Zur Abwechslung mal wieder ein kleines Projekt. In diesem Artikel beschreibe ich nach für nach die Entwicklung eines NC Teilapparats für unsere Korradi UW1 Universalfräsmaschine.
Zunächst das „Wieso“ und „Warum“.
Beim Arbeiten mit konventionellen Fräsmaschinen kommen Teilapparate (auch Drehtische genannt) immer dann zum Einsatz wenn Werkstücke in Winkelpositionen gehalten oder verfahren werden müssen. So lassen sich zum Beispiel symmetrische Lochraster erstellen oder Radien fräsen.
Vereinfacht besteht der Teilapparat aus einer Grundplatte sowie einer Teilplatte, welche durch ein Lager drehbar verbunden sind. Auf der Teilplatte wird meist ein Spannfutter montiert, aber auch Nutenplatten zur Werkstückspannung sind gebräuchlich.
Einfache Teilapparate werden mit der Hand gedreht und dann mechanisch geklemmt. Zur Einstellung der Teilung dient ein fest montierter Skalenring und/oder eine auswechselbare Teilscheibe mit verschiedenen vorgegebenen Teilungen.
Bessere Modelle besitzen ein Antriebsgetriebe (meistens Schneckengetriebe, teilweise aber auch Harmonic Drive Getriebe), welche ein Drehen mit Handkurbel oder Elektromotor erlauben.
Weil ich keinen Teilapparat mit Teilscheibe besitze (und Kurbeln sowieso doof ist) habe ich mich für den Bau eines NC gesteuerten Teilapparats entschieden.
[toc]Die Idee
Die Einheit besteht aus 3 Grundkomponenten
- Der Drehtisch mit Vierbackenfutter, Getriebe und Antriebsmotor
- Einem Gehäuse mit Spannungsversorgung und Servoendstufe
- Einer Bedieneinheit mit Magnet zur schnellen Befestigung an der Maschine
Ein Arduino stellt eine grafische menügeführte Oberfläche bereit und sorgt für die Step/Dir Signalerzeugung für die Motorendstufe.
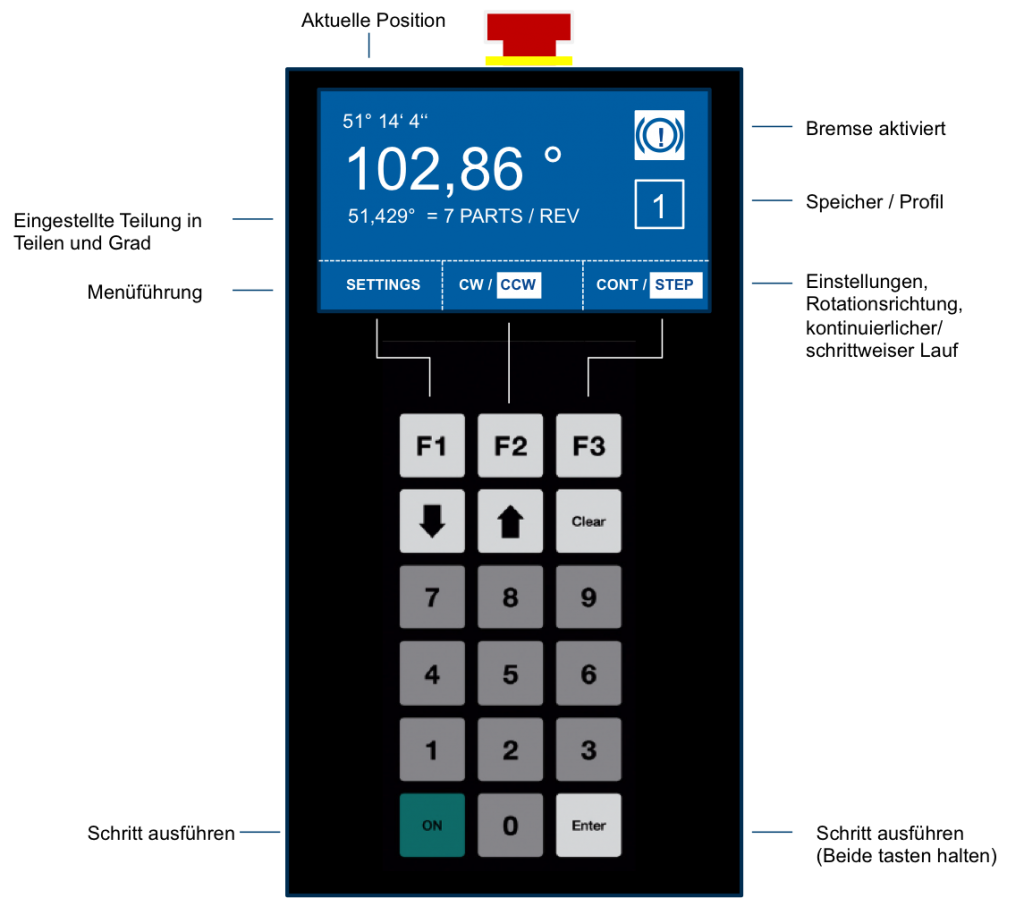
Das gesamte GUI soll simpel aufgebaut sein und die wichtigsten Informationen auf einen Blick preisgeben. Hier meine ersten „Skizzen“ aus PowerPoint.
Funktionen
Modi
- Schrittweise Drehung [Drehzahl, Drehrichtung]
- Kontinuierliche Drehung [Drehzahl, Drehrichtung] Bei 3.000U/min Eingangs- bzw. 300U/min Ausgangsdrehzahl kann man so auch leichte Drehfräsarbeiten mit der CNC Fräse durchführen
- Externer Step/Dir Betrieb zum Anschluss an bestehende CNC-Steuerungen als weitere Achse
Weite Funktionen
- Speicher für Profile / Setups
- Erstellen von Programmen für unregelmäßige Teilungen
Ausstattung
- Sensor für Nullpunkt
- Pneumatisches Magnetventil für eine Bremse
- Relais für elektromagnetische Bremse o.ä.
- 128×64 Pixel Grafikdisplay
Teileliste
[table “” not found /]Hardware
Mechanik
Die Mechanik nebst 1,1 KW Servomotor gab es zusammen mit einem Röhm Vierbackenfutter für unter 130 Euro bei eBay. Abgesehen davon, dass ich jetzt noch eine passende Servoendstufe mit Step/Dir finden muss, welche mit dem Servoencoder funktioniert, erst mal eine super Ausgangsbasis. Das Vierbackenfutter wird später zur Drehbank wandern, an dessen Stelle wiederum ein noch vorhandenes Dreibackenfutter montiert.

Einzig die Gesamtlänge stört ein wenig. Der Servo besitzt hinten noch einen aufgeflanschten Drehencoder… Eventuell tauschen wir den Motor gegen einen deutlich kürzeren Closed Loop Schrittmotor mit elektrischer Bremse aus.
Arduino
Meine Wühlkiste gab aktuell einen Arduino Uno und einen Mega her. Ich habe den Mega genommen, da ich so mehr Pins und auch Speicherplatz für das Programm habe. So wirklich sparsam programmieren liegt mir irgendwie nicht. Gerade die Bibliotheken für das Grafikdisplay schlucken Unmengen an Speicher (wenn man zu faul ist diese herunter zu minimieren).
Tastatur
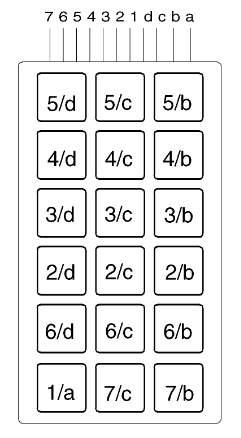
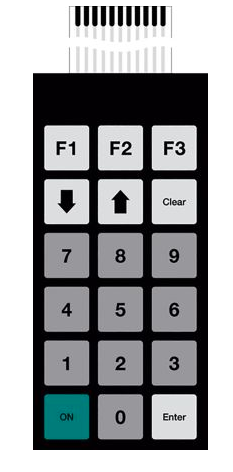
Ebenfalls ein eBay Zufallsfund. Ich hatte nach Folientastaturen mit Funktionstasten sowie vollem Nummernfeld gesucht. Gefunden habe ich eine neue FT 60018 D von BOPLA für weniger als 1/5 des Ladenpreises.
Das Ganze wird klassisch als Matrix angeschlossen. Unabhängig von der Anzahl der Tasten sind immer Zeilen und Spalten miteinander verknüpft (Siehe Schema). Für 18 Taster werden also nur 11 Pins benötigt.
Gehäuse
Ich wollte schon immer mal ein schickes Gehäuse für irgendetwas herstellen, nun habe ich die Gelegenheit dazu. Zumindest das Bedienteil erhält ein zweiteiliges Aluminiumgehäuse. Für die Leistungselektronik komm ein Gehäuse von der Stange zum Einsatz… wir wollen es ja nicht übertreiben.
Hier mein erster Entwurf des Gehäuses aus PowerPoint (noch nicht maßstabsgetreu).
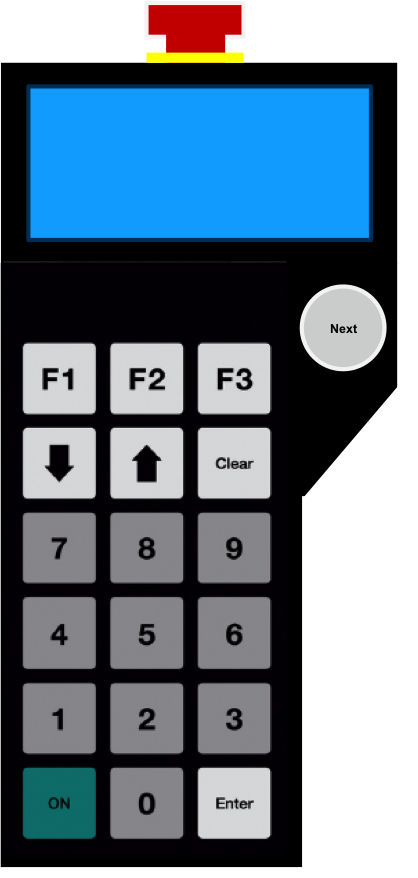
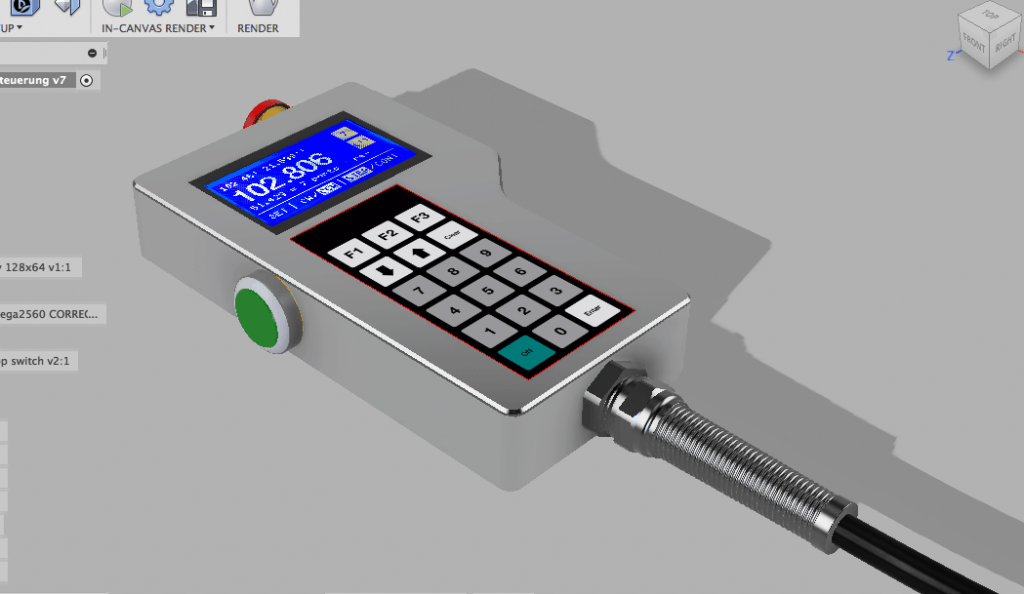
Und hier das ganze nochmal weiter fortgeschritten im CAD. Aufgrund der Größe der Bauteile ist die finale Form dann doch etwas wuchtiger ausgefallen (190 mm x 111 mm x 30mm). Vor allem den Not Aus Schalter unterzubringen ist nicht ganz einfach. Die Wahl ist auf einen RAFI Lumotast25 mit 16,5 mm Einbauöffnung gefallen.
Aktuell fehlen noch die Pfosten, um die beiden Gehäusehälften miteinander zu verschrauben, sowie die Abstandshalter/Hülsen für die elektronischen Komponenten.
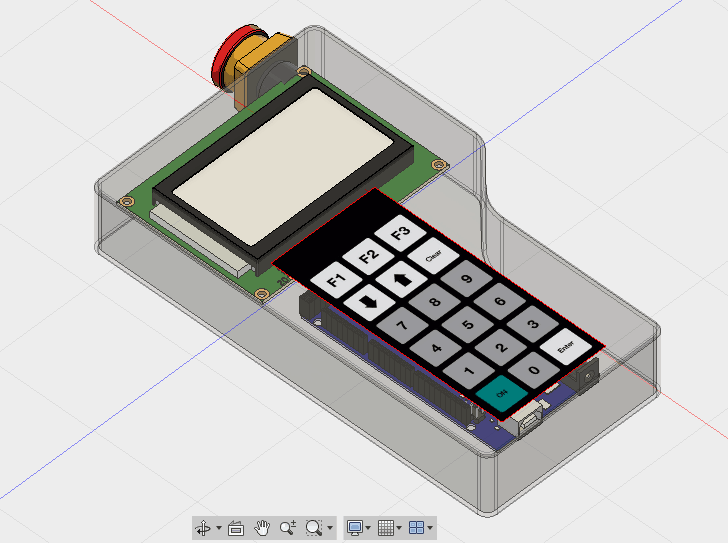
Das Gehäuse besteht aus 2 Teilen, welche jeweils von 2 Seiten bearbeitet werden müssen.
Software
An der Software arbeite ich schon fleißig. Hier die ersten fertigen Screens / Funktionen.
Das Grafikdisplay wird mit der u8g Lib mit Daten beschickt. Das ist super komfortabel und ist einfach in der Umsetzung. Manchmal würde ich mir jedoch einen Offline Debugger wünschen…
- Startbildschirm mit Auswahl interne (NC) oder externe (CNC) Steuerung. Entsprechend der Auswahl wird ein anderer Screen gezeigt.

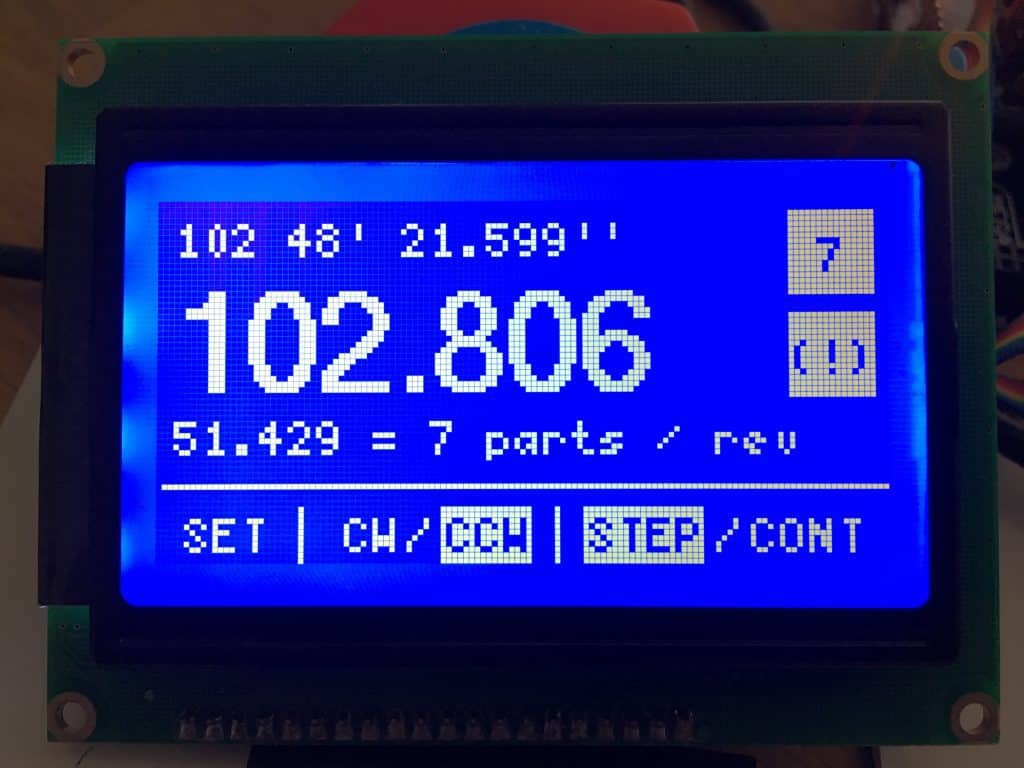
2. Positionsbildschirm im Modus 2 (NC). Informationen zur aktuellen Position, eingestellter Teilung in Grad und als Zahl, verwendete Speicherbank und Status der Bremse.
3. Settings Screen mit Parametern und Einstellungen. In der rechten Spalte wird der aktuelle Wert angezeigt. Navigiert wird innerhalb des Menüs mit den Zifferntasten. Das spart viel Klickerei.

Montage
Details später…
Testlauf
Details später…




Hallo,
Projekt: NC gesteuerter Teilapparat
darf man interesse an dem Projekt anmelden ? Mir gefallen die Komponenten… jedoch hab ich es mit der Software nicht so…. eventuell stellen Sie mir die Bauanleitung zur Verfügung!?
Mfg
Matthias
Morgen, gibt es die möglichkeit, die Software zu bekommen ? Möchte mir das Gerät auch bauen.
Mfg
Matthias
Hallo,
gibt es was neues zu diesem Projekt? Ich suche schon seit langem nach so einer Steuerung und wäre sehr daran interessiert. Mir geht es auch so wie Matthias, beim programmieren bin ich absoluter Neuling, habe aber schon mal was mit dem Arduino gemacht.
mit freundlichen Grüßen
Hi, bin über Euer Projekt gestolpert,
ich habe jetzt so ein Teilapperat mit Schrittmotor gebaut, leider habe ich es mit der Programierung auch nicht so…. Gibt es eine Möglichkeit an die Anleitung des ganzen zu kommen, sowie den Programmcode??
Grüße
Christoph
Guten Abend,
der Programmcode ist exakt auf unsere Komponenten und unseren Anwendungszweck ausgerichtet, ohne gute Kenntnisse kann man ihn nicht adaptieren.
Wir überlegen, ob wir das Projekt komplett veröffentlichen. In der Regel zieht das jedoch immer viele Fragen nach sich und dafür fehlt uns leider die Zeit.
Unter dem Stichwort „Arduino Indexer“ oder „Arduino Dividing Head“ findest du einige Englischsprachige Projekte mit fertigen Codebeispielen und Standard-Hardware.
Viele Grüße,
André